FocusBulbコントローラ
他の方々のBlogやWebを拝見していて、「電動Focus」そしてFocusを半自動であわせるためにタイマー撮影を組み合わせたくなりました。遠征での利用を考えると数百mAもの電流を消費するStepping MotorはOverspecだと思ったのですが、「モーター回さないときは電流とめればいいじゃん」と気づいてつくったのがこのシステムです。
作ってみての感想は「半自動とはいえ、こんなに楽になるのか!」ということです。これまでヘリコイドや鏡筒のFocusノブを「だろう勘」で微妙にまわしていましたが、再現性も高くピントの追いこみが確実にできます。また、Focusを移動しながらの試写を自動で繰り返すので手間がかからず、とても楽です。
タイマーフォーカスコントローラ
前回のタイマーコントローラと同様にUSB-IOでPCと繋ぎます。PCからコントロールできるのは、
デジタルカメラのシャッター(1ピット)
ステッピングモーターの回転(4ビット、ステップ毎)
同ステッピングモーターの電源のON/OFF(1ピット、通電中はパイロットLEDが点灯)
コントロールパッド(2ビット、リモコンを使ってファインダーを覗きながらフォーカスをあわせるための機能)
をつけています。ついでに、コンパレータを使って電源電圧低下検知機能(2ビット、11V,10V)を付けました。下の制御ソフトの下段にバッテリー電圧低下時警告等が現れます。
VBによるフォーカス&タイマー
VBを使って制御ソフトを作成しました。
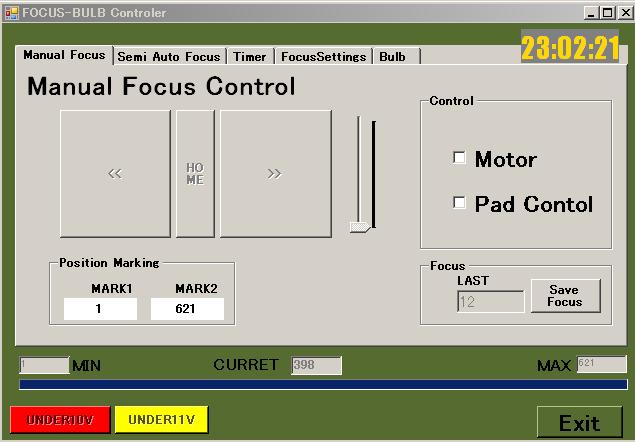
画面からマニュアルでのステッピングモーターの回転(ステッピングモータですので1ステップ単位での微動が可能)
コントロールパッドによるモーターの回転
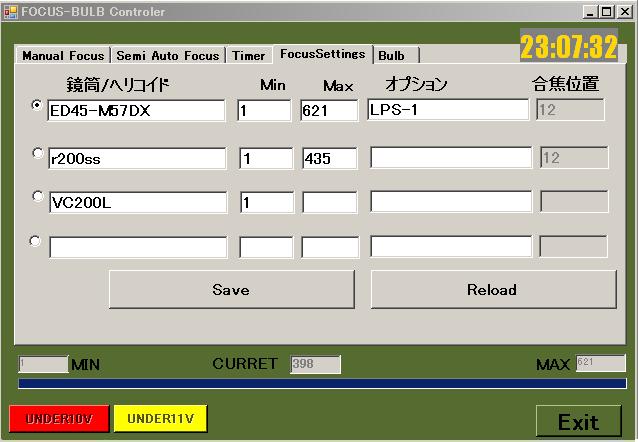
鏡筒名とFocusの可動範囲、合焦位置の記憶
範囲を指定してのFocus移動+自動撮影
タイマーコントローラ
これで、Focusの追い込みが手間いらずになりました。可動範囲内を指定した数に分割移動して順に試写を行います。試写結果をみて合焦位置を含む範囲に絞って再度試写を行うことで合焦位置をしぼりこんでいきます。
最新のVBを使ったのは初めてでしたが昔昔のVBやNBASICとは別の世界ですね。HSPではReal Timeでの動きを実現することに苦労しましたが、VBではすっきりと実現できました。
Borgヘリコイド 用ベルトドライブ
ツクモロボット館で購入したステッピングモータをアルミケースにいれガイドプレートに固定します。モータの回転はプーリーからゴムベルトを介してヘリコイドに伝えます。このままではベルトが滑ったのですがヘリコイドにビニールテープを巻きつけてうまくいってます。
BorgM57ヘリコイドDXの場合、可動範囲17mmを621ステップで動きますので1ステップごとに動かせば0.027mm(27マイクロメートル)単位で調節できます。ベルトドライブの精度にはあまり期待していなかったのですが、思いの他再現性が高いようです。
R200SSにもステッピングモータを付けましたが、まだテストしていません。
コントロールパッド
100円ショップで買った極小の密封容器に小ぶりのプッシュスイッチを2個つけただけのコントロールパッド。ファインダーの覗きながら手動でFocusを動かすことができます。下の操作例のように半自動での操作が便利なのでこのコントロールパッドの出番は少なくなりそうです。
使い方と結果
鏡筒、ヘリコイドの選択
あらかじめ、鏡筒、ヘリコイドの組み合わせを登録しておきます。モータの可動域が何ステップあるかも登録しておきます。 使用時には登録のなかから撮影に使う構成を選択します。
電圧低下アラームが下段に赤や黄色で出ていますが、ソフト単独で起動したためコントローラからの信号がきていないためのものです。
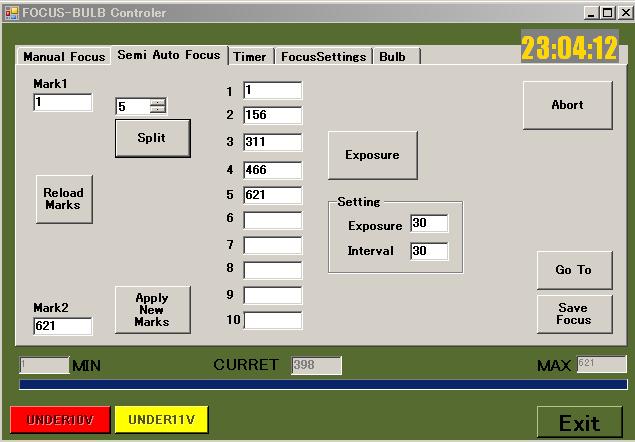
モータの回転区間と撮影枚数の選択
左の列にMark1, Mark2として絞りこんだ区間の最小値、最大値があります。分割撮影する枚数を指定して Splitボタンをおすと枚数分に区間が分割されて表示されます。
Exposureボタンを押すと枚数分、モーターを該当位置まで回転させながら撮影が行われます。
撮影結果をみて合焦位置を含むみられる2つのBoxを選択し、Mark1、Mark2に代入します。(Apply New Marks)
最初にもどりSplitボタンを押すと、新しい絞られたMark1,2の間で区間分割を行います。 以下、繰り返し、区間を絞り込んでいきます。
モーターは電力節減のため、回転中しか通電されません。
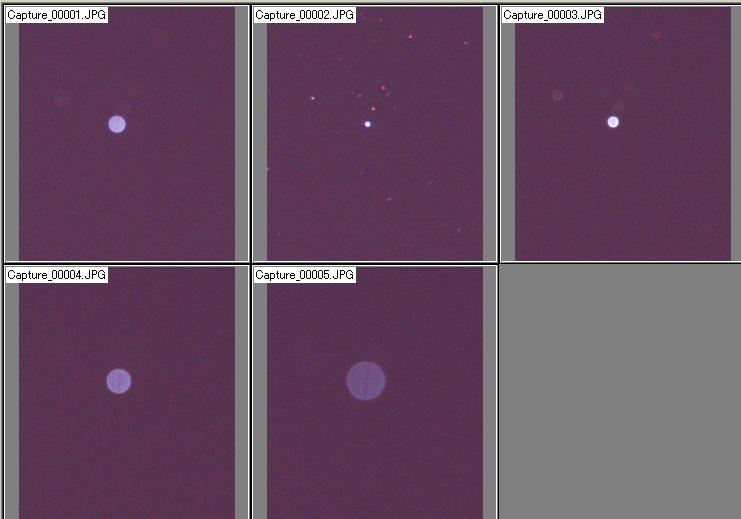
試写のイメージ
これはFly Eye LoopeのScreen Shotです。KissDからPCへの画像の取り込みはCanonの純正のRemote Capture、また閲覧にはFly Eye Loopeを使っています。
この例では左上の1枚目と右上の3枚目の間に合焦位置があると見られるので、1枚目と3枚目のモーターの位置の間をさらに分割して撮影をしなおします。
一旦試写を開始すれば望遠鏡のそばに行かずに、PCから合焦位置まで追い込む操作ができます。