 とりあえずまっすぐに歩くだけ
とりあえずまっすぐに歩くだけレゴが止まらない...
とりあえずまっすぐに歩くだけ
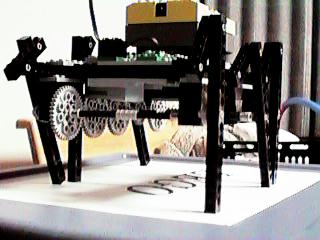 これも直進のみ、10cm/sec 位
これも直進のみ、10cm/sec 位
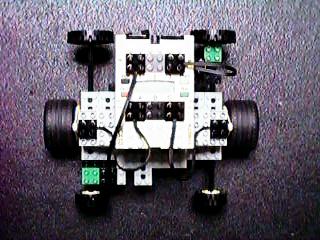
バンパーカー : 前後に取り付けた小タイヤ4個がバンパーです。左右それぞれの前後のバンパーが連結されていて4つのバンパーのどれがタッチしたかを2個のタッチセンサーからの入力で判断し、当たった側のタイヤを反転する様に成ってます
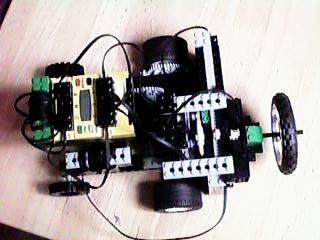
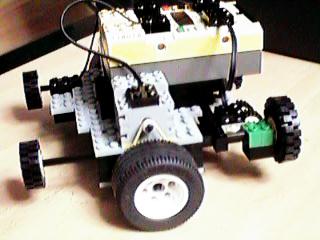
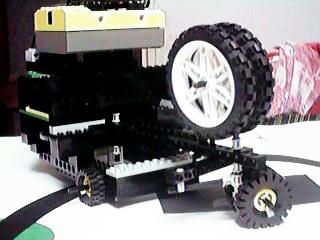
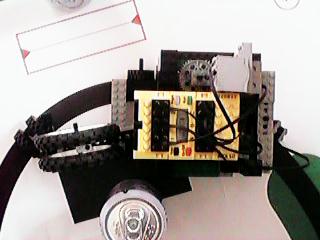
自走式スキャナー : 幅広のタイヤが自走用のタイヤです。写真では見にくいですがこのタイヤ軸と平行にラックギアが上面に乗ったモノレールが右に有り、このモノレールの左右に光センサ及び駆動用のモーターが振り分け荷物の様にぶら下がっています。右端の大きなタイヤはバランスウェイトです。パソコン側のソフトは Spirit を使って Delphi で作りました。
 LegoScan 2号機 : 1号機はサンプルを取り損なったまま壊してしまったんで作り直しました。
LegoScan 2号機 : 1号機はサンプルを取り損なったまま壊してしまったんで作り直しました。
画面サンプルはこちら

Kingyo 1号: 尻尾を左右に振ることで推進力を発生し、前輪につけた光センサーでラインをトレースします。ハンドリング及び尻尾振り用に書く1個のモータを使用し、ハンドリングのリミットセンサとしてタッチセンサを2個使用しました。このマシンは尻尾の駆動にウォームギヤから8枚歯のピニオンギヤを駆動し、これと同軸の40枚歯をクランクのアームとしていましたが、尻尾に過大な負荷が加わった時にウォームギヤが強引にピニオンを回そうとしてしまうので、テスト走行でコースを数周したときにピニオンギヤがちぎれてしまいました。(涙)

kingyo 2号: 尻尾の駆動を8枚歯から40枚歯への減速とし過負荷時にはモータが止まるようにしました。安定してコースを周回します。
{kind=link}