揹摦僈儞梡儌乕僞乕僗僺乕僪僐儞僩儘乕儔乮僗僺僐儞乯偺嶌惉
峏怴棜楌
| 2002.04.07 |
婎斅幨恀傪捛壛 |
| 2002.03.29 |
夞楬恾丄僾儘僌儔儉傪岞奐 |
偼偠傔偵
偙偺儂乕儉儁乕僕偱徯夘偟偰偄傞抏懍應掕婍偺嶌惉偱丄戝嶃偺崅尒嶳偝傫偲偁傟偙傟憡択偟偰偄傞偆偪偵丄揹摦僈儞偺楢幩懍搙傪帺桼偵曄偊傜傟傞憰抲偑梸偟偄傫偠傖乣丄偲偄偆榖戣偵側傝傑偟偨丅
揹摦僈儞偺僸儏乕僘偺戙傢傝偵撪憼偱偒傞偔傜偄偺戝偒偝偵側傜弌棃偦偆偱偡僱丒丒丒偲摎偊偨偽偭偐傝偵惉傝峴偒忋乮徫乯丄嶌傞偙偲偵側偭偰偟傑偄傑偟偨丅
僈儞傊偺慻傒崬傒摍丄幚憰偺徻嵶偼崅尒嶳偝傫偺僗僺僐儞嶌惉儁乕僕傪嶲徠偟偰捀偗傞偲岾偄偱偡丅
夞楬恾
僗僺乕僪僐儞僩儘乕儔夞楬恾
1000*750(gif 15kb)
崱夞偼PIC12C509A傪撪晹RC敪怳偺4MHz僋儘僢僋偱巊梡偟傑偡丅揹尮乮僶僢僥儕乕乯偼6V乣12V偺斖埻偲偟傑偟偨丅
FET僗僀僢僠僨僶僀僗偼崅尒嶳偝傫偐傜崅惈擻側僒儞僾儖傪採嫙偟偰捀偒丄側偐側偐枮懌偄偔暔偑弌棃傑偟偨丅FET偼IR幮偺IRL1404傗IRFBA1404P傪憐掕偟偰偄傑偡偑丄巊梡偡傞儌乕僞乕傗僶僢僥儕乕偵墳偠偰丄崙嶻摍擖庤惈偺椙偄N僠儍僱儖偺僷儚乕MOS-FET偵嵎偟懼偊偰傕椙偄偲巚偄傑偡丅
僷儚乕宯偲儘僕僢僋宯傪愗傝棧偡偨傔偵僼僅僩僇僾儔(TLP555)傪巊偭偰偄傑偡丅偙偺僇僾儔偼弌椡偑Push-Pull偵側偭偰偄傞偺偱丄FET偺僎乕僩傪崅懍偵僗僀僢僠儞僌偡傞偙偲偑偱偒傑偡丅傑偨丄僎乕僩揹埑傪Vcc嬤偔偵偲傞偙偲偑偱偒傞偺偱FET偺ON掞峈傪掅偔梷偊傞偙偲偑偱偒傑偡丅
巊梡偡傞FET偺僎乕僩偑5V枹枮(4V掱搙)偱廩暘ON偵側傞応崌偼夞楬恾偺曗懌偵偁傞傛偆偵丄偁偊偰僼僅僩僇僾儔傪巊傢側偔偰傕傛偄偱偡丅
僗僺乕僪挷惍偺曽幃偼PWM
(pulse width modulation)偱峴偄傑偡丅VR(20k兌)偲C(0.047uF)偵傛傞廩曻揹偱娙堈AD曄姺傪峴偄丄僷儖僗僨儏乕僥傿斾傪挷愡偡傞傛偆偵偟傑偟偨丅C(0.047uF)偼僒儞僾儕儞僌僐儞僨儞僒側偺偱廃攇悢摿惈偺椙偄億儕僗僠儗儞傗億儕僇乕儃僱乕僩丄儅僀儔摍傪巊偄傑偡丅
 |
TLP555+IRL1404巊梡帪 敀丗PIC偺GP2弌椡攇宍
愒丗FET偺僎乕僩揹埑攇宍
VCC = 8.4V
Duty = 70%
f = 1.4kHz
Vgs = 7.5V
|
丂
僾儘僌儔儉
僩儕僈僗僀僢僠偑ON偵側傞偲丄巒傔偺悢儈儕昩偼儌乕僞乕傪婲摦偡傞偨傔FET傪ON偵偟偰丄偦偺屻VR偱愝掕偝傟偨僨儏乕僥傿斾偱FET傪僪儔僀僽偟傑偡丅
VR偺抣傪撉傒偲傞偨傔偵丄傑偢GP4僺儞偺弌椡傪'H'偵偟偰C傪廩揹偟偰偍偒丄師偵GP4僺儞偺弌椡傪'L'偵愝掕偟偰VR傪宱桼偟偰C傪曻揹偟丄GP5偺擖椡偑'H'仺'L'偵側傞傑偱偺帪娫傪僇僂儞僩偡傞曽朄傪偲傝傑偟偨丅
PWM僪儔僀僽偼丄撉傒偲偭偨VR偺抣傪傕偲偵僷儖僗偺ON婜娫偲OFF婜娫偺僇僂儞僩抣傪媮傔偰丄儖乕僾張棟偵傛偭偰僷儖僗僪儔僀僽弌椡傪峴偄傑偡丅
僩儕僈僗僀僢僠偑墴偝傟偰偄側偄応崌偼擮偺偨傔PIC偺忬懺傪僗儕乕僾偵偟偰丄僋儘僢僋傪掆巭偝偣傞傛偆偵偟傑偟偨丅乮僩儕僈偑堷偐傟傟偽捈偪偵僂僃僀僋傾僢僾偟傑偡偑乯
PWM廃攇悢偼偲傝偁偊偢1.4kHz偵愝掕偟偰偄傑偡偑丄GP1僺儞傪GND偵愙懕偡傞偲攞偺2.8kHz偱僪儔僀僽偡傞傛偆偵側偭偰偄傑偡丅
巊梡偡傞儌乕僞乕傗僶僢僥儕乕丄偁傞偄偼僊傾斾傗僗僾儕儞僌偺嫮偝側偳偵傛偭偰丄嵟揔側僨儏乕僥傿斾偺愝掕斖埻偑堎側傞偲巚傢傟傞偺偱丄巊梡偡傞VR偺掞峈抣偵傛傝師偺傛偆側愝掕斖埻偑寛傑傞傛偆偵偟傑偟偨丅
俁侽倠兌亖侽亾乣侾侽侽亾
俀侽倠兌亖俀侽亾乣侾侽侽亾
侾侽倠兌亖俇侽亾乣侾侽侽亾
俀侽亾枹枮偩偲晧壸偱儌乕僞乕偑夞傜側偄偙偲偑懡偦偆側偺偱丄侾俆乣俀侽倠兌掱搙偑儀僗僩偩偲巚偄傑偡丅
僗僺僐儞丂僜乕僗亄Hex僼傽僀儖
(spcon14.zip 6kb)
丂
巊偄曽
尦乆偮偄偰偄傞僸儏乕僘傪僉儍儞僙儖偟偰丄杮婎斅傪撪憼偟傑偡丅
婛偵FET僗僀僢僠偵夵憿偟偰偄傞応崌偼丄FET偺僎乕僩偲僩儕僈SW偺娫偵杮夞楬傪擖傟傞傛偆側宍偵側傝傑偡丅
夞楬偺徚旓揹棳偼4mA傎偳偱偡偺偱丄宷偓偭傁側偟偱傕傎偲傫偳僶僢僥儕乕偼尭傜側偄偲巚偄傑偡偑丄埨慡偺偨傔巊傢側偄帪偼昁偢僶僢僥儕乕傪敳偔傛偆偵偟偰偔偩偝偄丅
僩儕僈傪堷偗偽VR偱愝掕偝傟偨懍搙偱儌乕僞乕偑夞傝傑偡丅VR傪挷惍偟偰偍岲傒偺楢幩懍搙偵挷惍偟偰偔偩偝偄丅嵟戝懍搙(VR=0兌懁)偺応崌偼扨側傞FET僗僀僢僠偲偟偰摦嶌偟傑偡丅
丂
New!
(2002.4.7)
偙偺僗僺僐儞偼庡偵PIC16F84傪巊偭偰僽儗僢僪儃乕僪偱帋嶌丄偦偺屻僾儘僌儔儉傪12C509偵堏怉丄偲偄偆庤弴偱嶌惉傪偟偰偄傑偟偨偑丄崱夞偼巹偺傎偆偱傕僥僗僩梡偵婎斅傪嶌惉偟偰傒傑偟偨丅掞峈偲0.1兪F偺僐儞僨儞僒偼僠僢僾晹昳傪巊偄丄帋偟偵俀奒寶偰峔憿偵偟偰傒傑偟偨丅偑丄屻偱夵憿偟擄偄帠偵婥晅偄偨僫儕丅丂(^^;
僐僱僋僞晹傪彍偒丄係俀亊侾俀亊侾俇(mm)偺戝偒偝偱偡丅
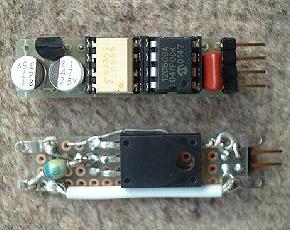 |
仠忋丗A婎斅乮儘僕僢僋婎斅乯昞柺 仠壓丗B婎斅乮僷儚乕婎斅乯昞柺
|
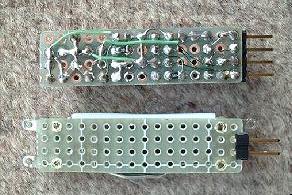 |
仠忋丗A婎斅棤柺 仠壓丗B婎斅棤柺
|
 |
仠A,B婎斅偺棤柺摨巑傪崌傢偣偰僒儞僪僀僢僠 仠揹尮+,
GND, 怣崋慄傪娧捠僺儞偱愙懕
|
 |
仠SW,VR 傪庢傝晅偗
丂 VR偼11mm亊9.5mm偺彫宆僞僀僾偵偟偰傒傑偟偨丅仸僶僢僥儕乕仌儌乕僞乕偺働乕僽儖偼僥僗僩梡偵嵶偄暔傪
丂巊偭偰偄傑偡丅
|
丂
偍傢傝偵
嵟弶偼帋嶌偟偰傕側偐側偐巚偄捠傝偵摦偄偰偔傟偢丄偟偐傕愝寁偺巹乮恄撧愳乯偲丄幚尡丒昡壙偺崅尒嶳偝傫乮戝嶃乯偺墦嫍棧楒垽丒丒丒傕偲偄丄墦嫍棧奐敪偩偭偨偨傔偵偄傠偄傠偲嬯楯偑愨偊傑偣傫偱偟偨丅(^^;
偳偆偵偐幚梡揑側傕偺偑弌棃偨偺偱偙偙偵岞奐偟傑偟偨偑丄偄偞姰惉偟偰偟傑偆偲壗偐偪傚偭偲庘偟偄婥傕偟偨傝丅丅
擸傒側偑傜傕岺嶌偡傞偙偲偺妝偟偝傪偁傜偨傔偰姶偠偨偺偱偁傝傑偟偨丅
栠傞
{kind=link}