
僐儞僩儘乕儔偼傾僋儕儖偺敔偵擺傔傑偟偨
傗偭偲僐儞僩儘乕儔BOX偑姰惉偟傑偟偨丅僴乕僪帺懱偼2寧偺偆偪偵弌棃偰偄偨偺偱偡偑丄僜僼僩偺傎偆偺僨僶僌偵庤娫庢偭偰偟傑偄丄傑偲傕偵摦偔傑偱敿寧傕旓傗偟偰偟傑偄傑偟偨丅
偙偺僐儞僩儘乕儔偼PIC偺EEPROM偵愝掕偝傟偰偄傞僷儔儊乕僞偺偆偪
傪 0(ms)乣100(ms) 偺斖埻偱擟堄偵愝掕偡傞偙偲偑偱偒傑偡丅
僐儞僩儘乕儔偼傾僋儕儖偺敔偵擺傔傑偟偨

塼徎偵偼偙傫側姶偠偱昞帵偝傟傑偡丅
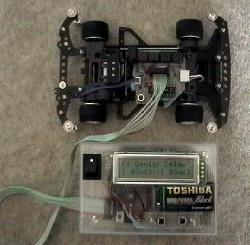
儅僔儞偵愙懕偟偰僙僢僥傿儞僌偡傞偺恾丅
娙扨偵僥僗僩偟偨尷傝偱偼僽儗乕僉帪娫偼4乣8ms掱搙偱廫暘側傛偆偱偡(30km/h庛偱憱峴偟偰偄傞偲丄儅僔儞偼1ms偱0.8cm傎偳恑傒傑偡)丅
挿偔僽儗乕僉傪偐偗偰偟傑偆偲昁梫埲忋偵懍搙偑棊偪偰偟傑偄丄僞僀儉偑埆偔側偭偰偟傑偄傑偡丅偙偺傊傫偼僐乕僗偵偁傢偣偰挷惍偱偒傞偺偱妝偟傒偑憹偊偨偐傕偟傟傑偣傫(^^;
僜乕僗僾儘僌儔儉偼偐側傝偄偄壛尭偵嶌偭偨偺偱抪偢偐偟偄偺偱偡偑丄偙偙偵偁傝傑偡丅(4僞僽偱曇廤偟偨偺偱僽儔僂僓偱偼尒擄偄偱偡丅偡傒傑偣傫)
丂
乽僶僢僥儕乕偺廩揹傪偳偆偟偰偄傞偺偐丠乿偲偄偆幙栤傪捀偒傑偟偨丅
MiMH傪3杮僴儞僟晅偗偟偰偟傑偭偰偄傞偺偱丄儅僔儞偵晅偄偰偄傞僗僀僢僠寭僾儔僌偱廩揹傪峴偄傑偡丅
廩揹婍偼-儮V傪専抦偡傞傕偺傪嶌傝傑偟偨丅

尦乆丄恊巕儗乕僗梡偵捠忢偺扨俁NiCd俀杮梡偱巊偭偰偄偨偺偱偡偑丄NiCd傑偨偼NiMH傪2杮傑偨偼3杮(僗僀僢僠偱愗傝懼偊)廩揹偱偒傞傛偆偵曄峏偟傑偟偨丅12V偺彫宆僶僢僥儕乕傪撪憼偟偰丄儗乕僗夛応偱捛壛廩揹偑偱偒傞傛偆偵側偭偰偄傑偡丅(撪憼12V僶僢僥儕乕偺廩揹偼暿搑壠掚梡揹尮偐傜偺廩揹婍偑昁梫偱偡偑丒丒)
廩揹惂屼丄-儮V偺専弌偵偼MAXIM幮偺NiCd/NiMH崅懍僶僢僥儕廩揹僐儞僩儘乕儔
MAX713
傪巊偄丄彮乆偺奜晅偗晹昳傪捛壛偡傞偩偗偺娙扨側夞楬偱幚尰偟傑偟偨丅
偪側傒偵媫懍廩揹帪偺揹棳偼1.5C(揹抮偺岞徧梕検偺1.5攞)偵愝掕偟傑偟偨偑幚嵺偺廩揹揹棳偼1.3A偔傜偄偺傛偆偱偡丅
偙偺傊傫傕曄峏偱偒傞傛偆偵偡傞偲側偍椙偄偺偱偟傚偆偑丄偦傟偱廩揹偟偨僶僢僥儕乕傪巊偭偰偳偺偔傜偄懍偔側傞偺偐岠壥偑傛偔暘偐傜側偄偺偱怺偔峫偊傞偺偼傗傔傑偟偨(徫)